ヒトの運動制御メカニズムの理解と生物制御原理の解明
-ヒトの動きを解明することでロボットはもっと賢くなれるのか-

私たちは普段何気なく歩き回り,ときにスポーツに興じ、また楽器の演奏を楽しんだりもします.これら一つ一つの動作は、複数の筋肉が巧みに連動しあう極めて複雑な運動ですが、私たちがその動作の詳細を意識することはできません.それどころか変に意識してしまうと,スポーツや楽器の演奏などでは,できるはずのこともできなくなってしまうことがよくあります。私たちは,自分でもよくわからないこのような動きを,どのように行っているのでしょうか。このようなヒトの運動制御メカニズムを理解して生物制御の原理として解明していくのがこの研究室の目的です。
ヒトの運動制御理解のキーワードは、「学習」と「適応」です。私たちは、自分の行動の「良し悪し」を自分で判断できます。失敗したら同じ間違いを犯さないように違う行動をとることもできます.このようなことを繰り返すことで、良い行動を「学習」することができます。それに対し,先ほど例に挙げたスポーツや楽器演奏などはある程度上達すると、無意識で動けるようになります。その際には、良し悪しを判断するというよりも、「体で覚える」というような感じ方で上達していくことができます。また周囲の環境が変わったりしても無意識のうちにそれに合わせたりすることもできます。これが「適応」です。この2つを巧みに組み合わせることで私たちは自分の運動を制御しています。
このような人の運動制御を理解することで、様々な病気から効率的な回復方法や、より健康に生きるための方法,またロボットをもっと賢く動かす方法などを研究しています。
Self-Support現象を用いた脳卒中リハビリテーション
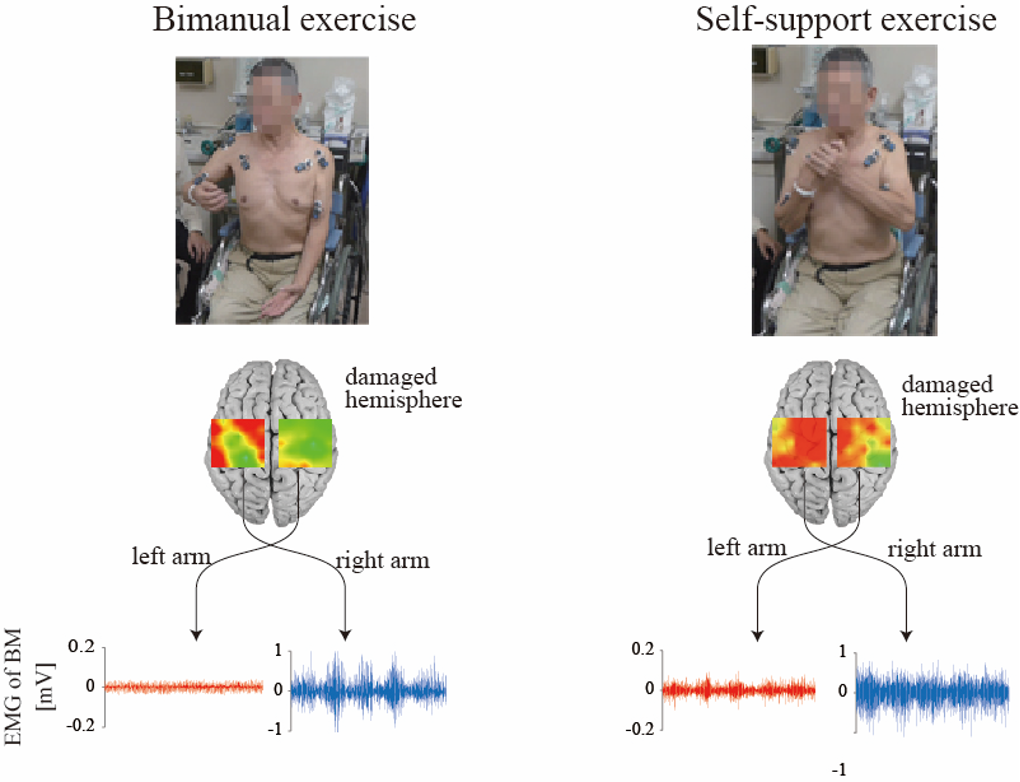
脳卒中による運動麻痺の残る腕を、麻痺のない健常な腕で補助することで、筋肉の活動が活発になり麻痺を低減する現象を発見しました。その現象を利用した運動麻痺からのリハビリテーションを行うことで、効率的な回復の可能性を示しています。
F. Alnajjar et al., "Self-Support Biofeedback Training for Recovery From Motor Impairment After Stroke," in IEEE Access, vol. 8, pp. 72138-72157, 2020
https://ieeexplore.ieee.org/document/9063489
生物制御の原理に基づくロボットのTacit Learningの提案

生物制御の重要な特徴の一つである,身体と環境の相互作用による環境への適応能力を,Tacit Learningとしてモデル化し,二足歩行ロボットの歩行学習に適用しました.写真のような研究室内だけでなく,屋外の芝生の上も歩行でき,かつそれぞれの環境に合わせた歩き方に動きを適応させることができます.
S. Shimoda,et. al., "Adaptability of Tacit Learning in Bipedal Locomotion," in IEEE Transactions on Autonomous Mental Development, vol. 5, no. 2, pp. 152-161, June 2013
https://ieeexplore.ieee.org/document/6491448
論文
- Fady Alnajjar, Ken-ichiI Ozaki, Matti Itkonen, Hiroshi Yamasaki, Masanori Tanimoto, Ikue ueda, Masaki Kamiya, Maxime Tournier, Chikara Nagai, Alvaro Costa Garcia, Kensuke Ohno, Aiko Osawa, Izumi Kondo and Shingo Shimoda, “Self-Support Biofeedback Training for Recovery From Motor Impairment After Stroke”, IEEE Access, vol. 8, pp. 72138-72157, 2020 10.1109/ACCESS.2020.2987095
- Katsuyuki Iwatsuki, Minoru Hoshiyama, Shintaro Oyama, Hidemasa Yoneda, Shingo Shimoda and Hitoshi Hirata, “Electroencephalographic Functional Connectivity with the Tacit Learning System Prosthetic Hand: a case series using motor imagery”, Front. Synaptic Neurosci., Vol. 12, Article 7, 2020 10.3389/fnsyn.2020.00007
- Guillermo Asin-Prieto, Aitor Martinez-Exposito, Filipe Oliveira Barroso, Eloy J Urendes, Jose Gonzalez-Vargas, Fady Alnajjar, Carlos Gonzalez-Alted, Shingo Shimoda, Jose L Pons and Juan C Moreno, “Haptic adaptive feedback to promote motor learning with a robotic ankle exoskeleton integrated with a video game”, Frontiers in Bioengineering and Biotechnology, Vol. 8, Article 113, 2020 10.3389/fbioe.2020.00113
- Alvaro Costa Garcia, Eduardo Ianez, Moeka Sonoo, Shotaro Okajima, Hiroshi Yamasaki, Sayako Ueda and Shingo Shimoda, “Segmentation and averaging of sEMG muscle activations prior to synergy extraction”, IEEE Robotics and Automation Letters, Vol. 5, Issue 2, 2020 10.1109/LRA.2020.2975729
- Ningjia Yang, Qi An, Hiroki Kogami, Kazunori Yoshida, Hiroshi Yamakawa, Yusuke Tamura, Kouji Takahashi, Makoto Kinomoto, Hiroshi Yamasaki, Matti Itkonen, Fady Sshibata-Alnajjar, Shingo Shimoda, Noriaki Hattori, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita, and Hajime Asama, “Temporal muscle synergy features estimate effects of short-term rehabilitation in sit-to-stand of post-stroke patients”, IEEE Robotics and Automation Letters, Vol. 5, Issue 2, 2020 10.1109/LRA.2020.2969942
- Alejandro Lopez Rincon, Cesar Cantu, Gibran Etcheverry, Rogelio Soto and Shingo Shimoda, “Function Based Brain Modeling and Simulation of an Ischemic Region in Post-Stroke Patients using the Bidomain”, Journal of Neuroscience Method, Vol. 331, No. 1, 2020 10.1016/j.jneumeth.2019.108464
- Alvaro Costa Garcia, Ken-ichi Ozaki, Hiroshi Yamasaki, Matti Itkonen, Fady Alnajjar, Shotaro Okajima, Masanori Tanimoto, Izumi Kondo and Shingo Shimoda, “Model for prompt and effective classification of motion recovery after stroke considering muscle strength and coordination factors”, Journal of NeuroEngineering and Rehabilitation, 16, Article Number 130, 2019 10.1186/s12984-019-0611-z
- Matti Itkonen, Alvaro Costa Garcia, Hiroshi Yamasaki, Shotaro Okajima, Fady Alnajjar, Takamitsu Kumada and Shingo Shimoda, “Influence of bimanual exercise on muscle activation in post-stroke patients”, Robomech Journal, Vol. 6, Article Number 14, 2019 10.1186/s40648-019-0142-1
- Ningjia Yang, Qi An, Hiroki Kogami, Hiroshi Yamakawa, Yusuke Tamura, Kouji Takahashi, Makoto Kinomoto, Hiroshi Yamasaki, Matti Itkonen, Fady Sshibata-Alnajjar, Shingo Shimoda, Noriaki Hattori, Takanori Fujii, Hironori Otomune, Ichiro Miyai, Atsushi Yamashita, and Hajime Asama, “Temporal Features of Muscle Synergies in Sit-to-stand Motion Reflect the Motor Impairment of Post-Stroke Patients”, IEEE Transactions on Neural Systems and Rehabilitation Engineering,27(10), 2019 10.1109/TNSRE.2019.2939193
- Fady Alnajjar, Sumayya Khalid, Alstair Vogan, Shingo Shimoda, Rui Nouchi and Ryuta Kawashima, “Emerging Cognitive Intervention Technologies to Meet the Needs of an Aging Populations: A Systematic Review”, Frontiers in Aging Neuroscience, Vol. 11, Article 291, 2019 10.3389/fnagi.2019.00291
- Hiroshi R. Yamasaki, Qi An, Makoto Kinomoto, Koji Takahashi, Takanori Jujii, Hiroki Kogami, Ningia Yang, Hiroshi Yamakawa, Yukuse Tamura, Matti Itkonen, Soeka Sonoo, Fady Alnajjar, Atushi Yamashita, HIronomi Tyomuke Noriaki Hattori, Hajime Asamam, Ichiro Miyai and Shingo Shimoda, “Organization of functional modularity in sitting balance response and gait performance after stroke”, Clinical Biomechanis, 67, 2019, pp. 61--69 10.1016/j.clinbiomech.2019.04.022
- Shotaro Okajima, Fady S. Alnajjar, Mitsuhiro Hayashibe, Yasuhisa Hasegawa, and Shingo Shimoda, “Theoretical Approach for Designing the Rehabilitation Robot Controller”, Advanced Robotics, 33:14, 674-686, 2019 10.1080/01691864.2019.1633402
- Fady Alnajjar, Juan C. Moreno, Ken-ichi Ozaki, Izumi Kondo and Shingo Shimoda, “Motor Control System for Adaptation of Healthy Individuals and Recovery of Post-Stroke Patients: A Case Study on Muscle Synergies”, Neural Plasticity,Volume 2019, Article ID 8586416, 2019 10.1155/2019/8586416
- Katsuyuki Iwatsuki, Minoru Hoshiyama, Shintaro Oyama, Shingo Shimoda and Hitoshi Hirata, “Magnetoencephalographic evaluation for the myoelectric hand prosthesis with tacit learning system”, NeuroRehabilitation, 2019;44(1):19-23, 2019 10.3233/NRE-182514
- Yukihiro Yamanaka, Kenko Uchida, Momoka Akashi, Yuta Watanabe, Arino Yaguchi, Shuji Shimamoto, Shingo Shimoda, Hitoshi Yamada, Masashi Yamashita and Hidenori Kimura, “Mathematical modeling of septic shock based on clinical data”, Theoretical Biology and Medical Modelling, 16:5, 2019 10.1186/s12976-019-0101-9
- Matti Itkonen, Shingo Shimoda and Takamitsu Kumada, “Quantifying the Difference Between Intention and Outcome in Driving Performance”, Transportation Research Part F: Psychology and Behaviour, Volume 62, pp. 126-134, 2019 10.1016/j.trf.2018.12.021
- Shotaro Okajima, Maxime Tournier, Fady S. Alnajjar, Mitsuhiro Hayashibe, Yasuhisa Hasegawa and Shingo Shimoda, “Generation of Human-like Movement from Symbolized Information”, Front. Neurorobot., Vol. 12. Airtcle 43, 2018 10.3389/fnbot.2018.00043
- Alvaro Costa Garcia, Matti Itkonen, Hiroshi Yamasaki, Fady Alnajjar, and Shingo Shimoda, “A Novel Approach to the Segmentation of sEMG Data Based on the Activation and Deactivation of Muscle Synergies During Movement”, IEEE Robotics and Automation Letters, 3(3):1972-1977, 2018 10.1109/LRA.2018.2811506
- Hiroki Kogami, Qi An, Ningjia Yang, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, Hajime Asama, Shingo Shimoda, Hiroshi Yamasaki, Matti Itkonen, Fady Alnajjar, Noriaki Hattori, Makoto Kinomoto, Kouji Takahashi, Takanori Fujii, Hironori Otomune and Ichiro Miyai, “Effect of Physical Therapy on Muscle Synergy Structure during Standing-up Motion of Hemiplegic Patients”, IEEE Robotics and Automation Letters, 3(3):2229-2236, 2018 10.1109/LRA.2018.2811050
- Mitsuhiro Hayashibe and Shingo Shimoda, “Synergetic Learning Control Paradigm for Redundant Robot to Enhance Error-Energy Index”, IEEE Transactions on Cognitive and Developmental Systems, Vol. 10, Issue 3,pp. 573-584, 2018 10.1109/TCDS.2017.2697904
- Shintaro Oyama, Shingo Shimoda, Fady SK Alnajjar, Katsuyuki Iwatsuki, Minoru Hoshiyama, Hirotaka Tanaka and Hitoshi Hirata, “Biomechanical Reconstruction Using the Tacit Learning System: Intuitive Control of Prosthetic Hand Rotation”, Frontiers in Neurorobotics, Volume10, Article19, 2016 10.3389/fnbot.2016.00019
- Alejandro Lopez Rincon and Shingo Shimoda, “The Inverse Problem in Electroencephalography using the Bidomain Model of Electrical Activity”, Journal of Neuroscience Method, Vol. 274, pp.94-105, 2016 10.1016/j.jneumeth.2016.09.011
- Hiroshi Yamasaki and Shingo Shimoda, “Spatiotemporal modular organization of muscle torques for sit-to-stand movements”, Journal of Biomechanics, Vol. 49, Issue 14, pp.3268-3274, 2016 10.1016/j.jbiomech.2016.08.010
- Saugat Bhattacharyya and Shingo Shimoda and Mitsuhiro Hayashibe, “A Synergetic Brain-machine Interfacing Paradigm for Multi-DOF Robot Control”, IEEE Transactions on Systems, Man, and Cybernetics: Systems, VOL. 46, NO. 7, 2016 10.1109/TSMC.2016.2560532
- Fady Alnajjar, Matti Itkonen, Vincent Berenz, Maxime Tournier, Chikara Nagai and Shingo Shimoda, “Sensory Synergy as Environmental Input Integration”, Front. Neurosci., Vol. 8, Article 436, 2015 10.3389/fnins.2014.00436
- Tytus Wojtara, Fady Shibata Alnajjar, Shingo Shimoda and Hidenori Kimura, “Muscle Synergy Stability and Human Balance Maintenance”, Journal of NeuroEngineering and Rehabilitation, 11:129, 2014 10.1186/1743-0003-11-129
- Mitsuhiro Hayashibe and Shingo Shimoda, “Synergetic Motor Control Paradigm for Optimizing Energy Efficiency of Multijoint Reaching via Tacit Learning”, Front. Comput. Neurosci., Vol. 8, Article 21, 2014 10.3389/fncom.2014.00021
- Fady Shibata Alnajjar, Tytus Wojtara, Hidenori Kimura and Shingo Shimoda, “Muscle Synergy Space: Learning Model To Create an Optimal Muscle Synergy”, Front. Comput. Neurosci., Vol. 7, Article 136, 2013 10.3389/fncom.2013.00136
- Shingo Shimoda, Yuki Yoshihara and Hidenori Kimura, “Adaptability of tacit learning in bipedal locomotion”, IEEE Transactions on Autonomous Mental Development, Vol. 5, No. 2. pp. 152-161, 2013 10.1109/TAMD.2013.2248007
- Tytus Wojtara, Makoto Sasaki, Hitoshi Konosu, Masashi Yamashita, Shingo Shimoda, Fady ALNAJJAR and Hidenori Kimura, “Artificial Balancer - Supporting Device for Postural Reflex”, Gait and Posture, No.35, pp316-321, 2012 10.1016/j.gaitpost.2011.10.002
- Shingo Shimoda and Hidenori Kimura, “Bio-mimetic Approach to Tacit Learning based on Compound Control”, IEEE Transactions on Systems, Man, and Cybernetics-Part B, Vol. 40, No. 1, pp.77-90, 2010 10.1109/TSMCB.2009.2014470
- Tytus Wojtara, Masafumi Uchihara, Hideyuki Murayama, Shingo Shimoda, Satoshi Sakai, Hideo Fujimoto and Hidenori Kimura, “Human-Robot Collaboration in Precise Positioning of a Three-Dimensional Object”, Automatica, Vol.45, pp333-342, 2009 10.1016/j.automatica.2008.08.021
- Shingo Shimoda and Hidenori Kimura, “Neural Computation Scheme of Compound Control: Tacit Learning for Bipedal Locomotion”, Journal of Control, Measurement, and System Integration, Vol. 1, No. 4, pp.275-283, 2008 10.9746/jcmsi.1.275